微机原理总结
8086寄存器结构
通用寄存器组
| AH | AL | AX | 累加器 |
|---|---|---|---|
| BH | BL | BX | 基数 |
| CH | CL | CX | 计数 |
| DH | DL | DX | 数据 |
| SP | 堆栈指针 |
|---|---|
| BP | 基址指针 |
| SI | 源变址 |
| DI | 目的变址 |
其他
| IP | 指令指针 | |
|---|---|---|
| FH | FL | 状态标志 |
| CS | 代码段寄存器 |
|---|---|
| DS | 数据段寄存器 |
| SS | 堆栈段寄存器 |
| ES | 附加段寄存器 |
汇编指令
一些默认
- 执行指令后,dst中存放运算结果
- 一个单元(nn)给字时,为nn和nn+1
寻址方式
寻得操作数来源
固定寻址
操作数地址被隐含于操作码中,无需计算EA
立即数寻址
操作数直接放在指令字段中,执行时直接从此读取
显然,由于其无法存放运算结果,故只能作为原操作数使用
寄存器寻址
使用CPU内部寄存器中数据作为操作数
CPU内部执行,无需总线周期
存储器寻址
一般位于DS、SS、ES中,需EU计算出EA,再由BIU计算出PA,通过PA取得操作数
src和dst只能有一个为存储器操作数
直接寻址
直接给出EA(nn)
?S: [nn]
段首址缺省值DS
寄存器间接寻址
EA于寄存器(BX\SI\DI\BP)中,其中BX、SI、DI段首址缺省DS,BP缺省SS
寄存器相对寻址
加上偏移量
AREA[SI]
缺省同上
基址变址寻址
基址加上变址,缺省同上
相对基址加变址寻址
超级加倍
串寻址
隐含使用SI(指向源串首字)、DI
SB或SW(字串)
32为寻址
变址乘了一个比例系数,其他不变,寄存器名称变(前面加个E)
I/O端口寻址
直接端口寻址
端口数0~255
寄存器间接端口寻址
端口数大于255的,放在一寄存器中转借一下
8086指令系统
| im | 立即数 |
|---|---|
| reg | 寄存器 |
| seg | 段寄存器 |
| m | 存储单元 |
CS、IP两个寄存器不做dst
Data Transfer
通用传输
| MOV | im到seg、seg到seg、m到m🙅 |
|---|---|
| XCHG | 交换两操作数内容,im、seg🙅,必有一个reg |
| PUSH | 用于程序保护,不对字节操作(对字,高位先入 |
| POP | 用于恢复数据,同上(SP自动加2 |
累加器专用
| IN | 只能用于AX/AL,tx |
|---|---|
| OUT | 中间寄存器只能使用DX,ts |
| XLAT | (BX+AL)➡️ AL,可用于查表 |
地址-目标传送
| LEA reg src | src的EA ➡️ reg |
|---|---|
| LDS reg src | src的(EA+2) ➡️ DS、src的EA ➡️ reg |
| LES | 与LDS类似 |
标志寄存器传送
| LAHF | Load AH from Flags, 标志位第八位读到AH |
|---|---|
| SAHF | 与上反 |
| PUSHF | 标志寄存器入栈 |
| POPF |
Arithmetic
scr和dst必须有一个为reg(scr为im的情况除外
8位无符号数 0~255(FFH(显然16位到FFFF H
显然8位有符号数(80H~7FH即 -128~ +127)、16位 8000H ~ 7FFFH
加减法两个操作数必同为无符号OR有符号
组合BCD:一字节两位 非组合BCD:一字节第四位表示一位
除INC指令不影响CF外,其余均影响CF、OF等六个标志位
调整指令要求操作数为 B, 其他B、W均可
标志位变化
| CF | 无符号溢出 | OF | 有符号溢出❌ | ZF | 运算结果为0时置1 |
|---|---|---|---|---|---|
| SF | 运算结果为负置1 | PF | 运算结果有偶数个1,置1 | AF | 操作数为BCD,半字节进位,置1 |
加法
| ADD | 双精度字先低位ADD,后高位ADC |
|---|---|
| ADC | 带进位,加上CF |
| INC | 修改指针OR循环计数(不修改CF故不用于控制循环结束 |
| AAA | 对非组合BCD调整,结果分为AH、AL存入AX |
| DAA | 组合BCD十进制调整,若超范围则加6调整,默认在AL中进行 |
减法
| SUB | 无借位 |
|---|---|
| SBB | 将低位借的CF减去 |
| DEC | 同INC对CF无影响 |
| NEG | 求补码(0-src)➡️ src 即 (FFH - src)➡️ src,显然src不为0时使CF = 1 |
| CMP | 相减,但结果不送dst,只更改标志位 |
| AAS | 非组合十进制调整,-6 |
| DAS | 组合十进制调整 |
乘法
| MUL src(B or W) | AL*src ➡️ AX 或 AX *src ➡️ DX,AX,无符号 |
|---|---|
| IMUL src | 同上,有符号 |
| AAM | 非组合十进制调整,组合无法调整 |
除法
| DIV src | AX/src ➡️ AL DX,AX/src ➡️ AX 余数➡️AH 或 DX |
|---|---|
| IDIV src | |
| AAD | 非组合十进制调整,组合无法调整 |
| CBW | AL按符号拓展为AX, AL<80H➡️AH=00H 反之AH=FFH |
| CWD | AX ➡️ DX,AX,按符号拓展 |
Logic and Shift
操作数类型均可B 或 W
布尔型指令
| AND | 可用于对指定位屏蔽(清零) |
|---|---|
| OR | 可用于对特定位置1 |
| XOR | 可通过查看ZF比较操作数是否相同 |
| TEST | 与AND类似,只影响标志位 |
| NOT | 取反码 |
| 技巧 | AND AX,AX OR AX,AX XOR AX,AX 都可清CF,但XOR同时清AX TEST AL,01H 可检测AL为奇/偶 |
移位
| SHL/SAL | 低位补0,原高位进CF,高位不等于CF➡️OF=1则符号改变 |
|---|---|
| SHR | 高位补0,原低位进CF |
| SAR | 原高位补高位,低位进CF |
| ROL | 原高位进CF且补低位 |
| ROR | 原低位进CF且补高位 |
| RCL | 原高位进CF,原CF补低位 |
| RCR | 原低位进CF,原CF补高位 |
| 技巧 | 循环指令通过每次检测CF可以判断reg/meg含1或0的个数 |
String Manipulation
串操作使用的寄存器
| SI | 源字符串变址寄存器 |
|---|---|
| DI | 目的字符串变址寄存器 |
| CX | 重复操作次数计数器 |
| AL/AX | SCAS扫描值、LODS的dst、STOS的src |
| DF | 等于0➡️SI、DI自动加1(2);等于1 减 |
| ZF | 扫描、比较串操作终止标志 |
| MOVS/MOVSB/MOVSW | 串传送,要提前将串的变址以及传送长度存入对应reg |
|---|---|
| CMPS/CMPSB/CMPSW | 串比较,根据ZF判断结果(减法) |
| SCAS/SCASB/SCASW | 串搜索,在DI所指串中搜索AL(AX),判断同上 |
| LODS/LODSB/LODSW | 把SI所指串取到AL(AX)中,显然无法使用重复前缀 |
| STOS/STOSB/STOSW | 存串指令 |
| REP/REPZ/REPE/REPNE/REPNZ | CX=0时退出;REPZ/REPE附加ZF条件,等于0提前退出;REPNE/REPNZ同理 |
Control Jump
原理:改变CS与IP
无条件转移、调用、返回
段内转移,目标为NEAR类,近转移,改IP; 段间转移,目标为FAR类,远转移,改CS和IP
| JMP | 可段内直接寻址(JMP NAME PTR TAGET或JMP SHORT OBJECT) 可段内间接寻址(JMP reg或JMP WORD PTR[SI]) 可段间直接寻址(JMP FAR PTR LABEL, LABEL为转移地址号) 可段间间接寻址(JMP DWORD PTR[BX] [SI]) |
|---|---|
| CALL | 调用格式同上 多了保存的功能,分四步 1⃣️ (SP-2)➡️SP;CS ➡️((SP+1),(SP)) 2⃣️SEG➡️CS 3⃣️(SP-2)➡️SP;IP ➡️((SP+1),(SP)) 4⃣️dst➡️IP |
| RET | 恢复栈即SP+4,后面可加立即数加到SP,过程与上面相反 |
条件转移指令
JCC Target 若CC成立则跳转到target
无N时J后两字符为或关系,有N后面字符为与关系
| A | above |
|---|---|
| B | below |
| C | carry |
| E | equal |
| Z | zore(ZF) |
| G | greater(有符号) |
| L | less |
| O | overflow(OF) |
| P | parity(奇偶位PF) |
| CXZ | CX is zero |
| s | sign |
循环控制指令
以CX为计数器,CX不等于0时相当于执行(IP+8)➡️IP
| LOOP | JNZ??? |
|---|---|
| LOOPZ/LOOPE | CX=0或ZF=0均可退出循环 |
| LOOPNZ/LOOPNE | CX=0且ZF=0退出循环 |
Processor Control
状态标志位操作指令
| CF | 进位标志位 | DF | 方向标志位 | IF | 中断标志位 |
|---|
| CLC | CF置0 |
|---|---|
| CMC | CF取反 |
| STC | CF置1 |
| CLD 控制串操作执行(方向 | DF置0 |
| STD 同上 | DF置1 |
| CLI 禁止CPU响应 | IF置0 |
| STI 允许 | IF置1 |
外部同步指令
| HLF | 停机等待外部中断 OR 复位 |
|---|---|
| WAIT | CPU空转状态等待外部中断,完成后返回空转 |
| ESC OPC ,src | 协处理器相关 |
| LOCK | 总线封锁前缀,使LOCK=0 |
空操作指令
| NOP | 占3个时钟周期 |
|---|
Interrupt
中断及终端返回指令
| INT n | n为中断类型号 F、CS、IP入栈,TF、IF清0 取入口偏移地址存入CS、IP |
|---|---|
| IRET | 中断返回指令,F、CS、IP出栈 |
专用中断
| 0 | 除数为0时响应 | 1 | 单步中断,触发条件TF=1 | 2 | 紧急非屏蔽中断NMI | 3 | 断点中断,INT指令触发 | 4 | 溢出中断,INTO指令触发 |
|---|
1 | graph LR |
使用:MASM宏汇编
MASM宏汇编语言规范
分段结构
- 对应CPU内存分段管理
- 每段有名字且以伪指令 SEGMENT 开始,以 ENDS 结束
- 源程序由若干段组成,以 END 结束
语句构成
语句类型
- 指令语句,以助记符为基础
- 伪指令语句,管理性,不产生机器代码
- 宏指令语句
构成与规范
名字域:
- 由字母开头,可包含数字和专有字符
- 指令语句名字后跟冒号,伪指令无
操作符域:
- 主要为助记符
操作数域:
逗号分隔
存储器操作数
- 标号:指令语句的名字域,可认为是指令语句的地址
- 变量:存放在某存储单元的数据,变量符号的地址
表达式:由以上以及运算符组合而成
运算符
算数运算符:完成整数的运算,结果为整数
+、-、*、/ MOD(求余)、SHL、SHR 逻辑运算符
关系运算符
EQ 相等 NE 不等 LT 小于 GT 大于 LE 小于等于 GE 大于等于 分析运算符
SEG 求段基址 OFFEST 求偏移量 TYPE 求变量类型 SIZE 求字节数 LENGTH 求变量长度 TYPE类型值
1 2 4 -1 -2 DB DW DD NEAR FAR 综合运算符
为存储器地址操作数临时指定一个新属性
PTR 将左边类型指定给右边地址 THIS 类似上;与下一条指令分配的段、偏移、属性相同
伪指令
数据定义
DB~DD、DQ、DT
重复操作符 DUP [变量名] DB 100 DUP(?) ?表示不设初值(随机
符号定义
| EQU | 类似于C中#define,不允许重复定义 |
|---|---|
| = | 允许重复定义 |
段定义
段名 SEGMENT [定位类型] [组合类型] [‘类别’]
段内语句
段名 ENDS
- 定位类型:起始边界要求 缺省值PARA
- 组合类型:表示与其他段关系 缺省值NONE
- 类别:一种名字信息
段寻址ASSUME
用来设定各段名与 段寄存器间关系 格式:ASSUME 段寄存器名 : 段名 , 段寄存器名 : 段名 ……
没有给出初值,需和初始化代码配合使用;CS段首址无需初值,系统自动设置
过程定义 PROC/ENDP
格式
1 | 过程名 PROC [NEAR]/FAR(属性) |
程序计数器 $
$的值为程序下一所能分配存储单元的偏移地址
定位伪指令 ORG
指定下一条语句的 偏移地址
结构伪指令
1 | 定义: |
记录伪指令
记录共1~2字节,可为每个字段分配二进制位数
1 | 定义: |
宏相关
1 | 宏定义: |
系统调用功能
见PDF
主存储器
半导体存储器
分类
按读写功能:RWM、ROM (只写、只读
按存取方式:DAM、SAM、RAM (直接存取、顺序存取、随机存取
按器件分类:双极性TTL、单极性MOS
双极性快、功率大、集成度低
单极性相反
按存储原理:RAM、ROM
RAM可读可写、断电丢失
ROM正常只读、断电不丢失
按数据传送方式:并行、串行
性能指标
- 存储容量
- 存取时间
- 功耗
- 工作电源
- TTL +5V
- MOS +3~+18V
组成
- 存储体
- 地址译码器
- 控制逻辑电路
- 数据缓冲器
高速缓存工作原理
- 依赖:
- 程序访问的局部性
- 数据相对集中存储
- 把频繁访问的指令、数据存放在速度非常高 (与CPU速度相当)的SRAM——高速缓存 CACHE中
- 取指令、数据时先到CACHE中查找,没找到再到RAM找
- 系统的平均存取速度(加权平均) ≈ Cache存取速度×命中率+RAM存取速度×不命中率
- Cache与内存的空间比一般为1:128。
存储器寻址方法
片选:根据主存储器 系统对每个存储器芯片的地址范围的分配
字选:选中存储器芯片片内存储单元,由芯片内地译码电路完成
I/O接口
I/O组成
接向CPU
总线驱动器:匹配CPU数据总线速度和驱动能力
地址译码器:接收CPU总线信号并译码,对各端口(reg)寻址
控制逻辑:实现CPU对端口读写操作和时序控制
接向外设
- 缓冲器(数据reg)
- 控制reg:存放CPU控制命令
- 状态reg:保存状态以供CPU查询
I/O控制方式
程序控制
- 无条件传送(同步传送
- 条件:外设必须随时准备就绪
- 条件传送(查询传送
- 先查询外设工作状态,在外设就绪后进行数据输入、输出
DMA控制
中断
三大用途:分时操作、实时处理、故障处理
可屏蔽中断(IF=0时屏蔽
使IF=0情况:
关中断、禁止中断、中断屏蔽
系统复位,使IF=0
任何一个中断被响应,使IF=0
执行指令CLI,使IF=0
使IF=1情况:
- 开中断、允许中断、中断开放
- 执行指令STI,使IF=1
中断向量在中断向量表中的位置称为中断向量地址;
中断向量地址=中断类型号×4
中断子程序使用IRET指令返回
8259A芯片
寄存器
- 中断请求寄存器IRR(8位)
- 保存8条外界中断请求信号IR0~IR7的请求状态
- Di位为1表示IRi引脚有中断请求
- 中断服务寄存器ISR(8位)
- 保存正在被8259A服务着的中断状态
- Di位为1表示IRi中断正在服务中;为0表示没有被服务(处理完毕)
- 中断屏蔽寄存器IMR(8位)
- 保存CPU送来的对中断请求信号IR的屏蔽状态
- Di位为1表示IRi中断被屏蔽(禁止)
优先级分析器PR
- 定义和修改IR0-IR7的优先级别 (通常IR0为高,IR7为最低)
- 同时出现几个中断请求时,根据 优先级别决定处理哪一个
- 处理中断嵌套
工作过程
执行一段CPU的初始化程序, 向8259写命令字,规定8259的工作状态(初始化
中断源通过IR0~IR7向8259A发中断请求,8259A中断请求寄存器IRR的相应位置1
IRR中经中断屏蔽寄存器IMR允许后的置位 进入优先权判别器PR
PR将其中最高优先权的中断请求经控制逻辑向CPU发INT(高电平)请求
若 CPU 处于开中断状态 (IF=1),在当前指令执行结束后,启动中断响应总线操作(发出两个负脉冲作为响应信号)
8259A接收到第一个负脉冲
- 使ISR相应位置1,表示CPU已为该中断请求服务
- 使IRR的相应位清0(防止一次申请的重复处理)
8259A接收到第二个负脉冲
将中断类型号送上数据总线(中断类型号由用户编程和中断请求引脚IRi的序号i共同决定)
CPU读取中断类型号(经响应过程后)进入中断服务程序,直到服务结束返回。
CPU向8259A送中断结束命令作为中断结束标志
若工作在AEOI方式:在第2个INTA#结束时使ISRi复位; 否则由CPU发出EOI命令使ISR i复位
工作方式(5方面)
- 中断优先方式与中断嵌套(各两种
- 中断结束处理方式 (三种EOI命令
- 屏蔽中断源的方式 (两种
- 中断触发方式(两种
- 级联工作方式
通过初始化命令字 (ICW1ICW4) 和操作命令字 (OCW1OCW4) 设置
中断优先方式与中断嵌套
- 中断优先方式
- 固定优先级
- 所有中断请求IRi的中断优先级固定不变
- 优先级排列顺序可编程改变
- 默认优先级顺序从高到低为IR0~IR7
- 循环优先级方式
- 自动中断优先级循环,初始优先级顺序可用编程改变
- 中断请求IRi被处理后,其优先级别自动降为最低, 原来比它低一级的中断上升为最高级
- 固定优先级
- 中断嵌套(中断处理过程中被更高优先级中断)方式
- 普通全嵌套方式(默认
- 中断被处理时,只有更高优先级中断可打断
- 特殊全嵌套方式
- 允许同级或更高优先级打断
- 仅用于多个8259A级连时的主8259A
- 普通全嵌套方式(默认
中断结束处理方式
- IRi中断被服务时,ISR中的相应位 ISRi=1,结束后必须清零该位
- 通过向8259A发出中断结束命令 (EOI命令)使ISRi=0(中断结束处理
- 三种EOI命令
- 自动EOI(AEOI)
- 第2个INTA#结束时,由8259A使 ISRi自动复位
- 不用于中断嵌套方式(不保留当前正在服务的中断的状态
- 普通中断结束方式EOI(NSEOI)
- 由CPU发出正常EOI命令
- 使ISRi=1的位中优先级最高的那一位复位
- 特殊中断结束方式EOI(SEOI)
- 由CPU发出一条SEOI命令,指出所要复位的ISR的位号
- 用于特殊屏蔽方式
- 自动EOI(AEOI)
屏蔽中断源的方式
普通屏蔽方式
IMR屏蔽字决定禁止某位IRi所对应的中断:IMi=1 禁止
特殊屏蔽方式
- 假定正在处理IR6,先进入特殊屏蔽方式, 然后设置IM6=1
- 这时除IR6外的所有中断请求均能得到响应
- 只能用特殊中断结束命令结束中断
中断触发方式
边沿触发
IRi上升沿表示有中断请求,触发后可以一直保持高电平
电平触发
在第1个INTA#结束前,IRi必须保持高电平,得到响应之后,输入端必须及时撤出高电平
级联工作方式
- n片8259A可支持7n+1个中断源
- 只能有一片8259A为主片 ➡️ 最多64个中断源
- CAS0-CAS2 链接主从片
- 主SP#/EN# 接高,从接低
- 从INT接主IRi
编程(只考初始化
- 初始化命令字ICW:
- ICW1~ICW4
- 整个系统工作过程中保持不变
- 操作命令字OCW:
- OCW1~OCW3
- 改变初始化的8259A中断控制方式
- 屏蔽某些中断
- 读出8259A状态信息
- 可在初始化之后的任何时刻写入 8259A,并可多次设置
内部寄存器的寻址
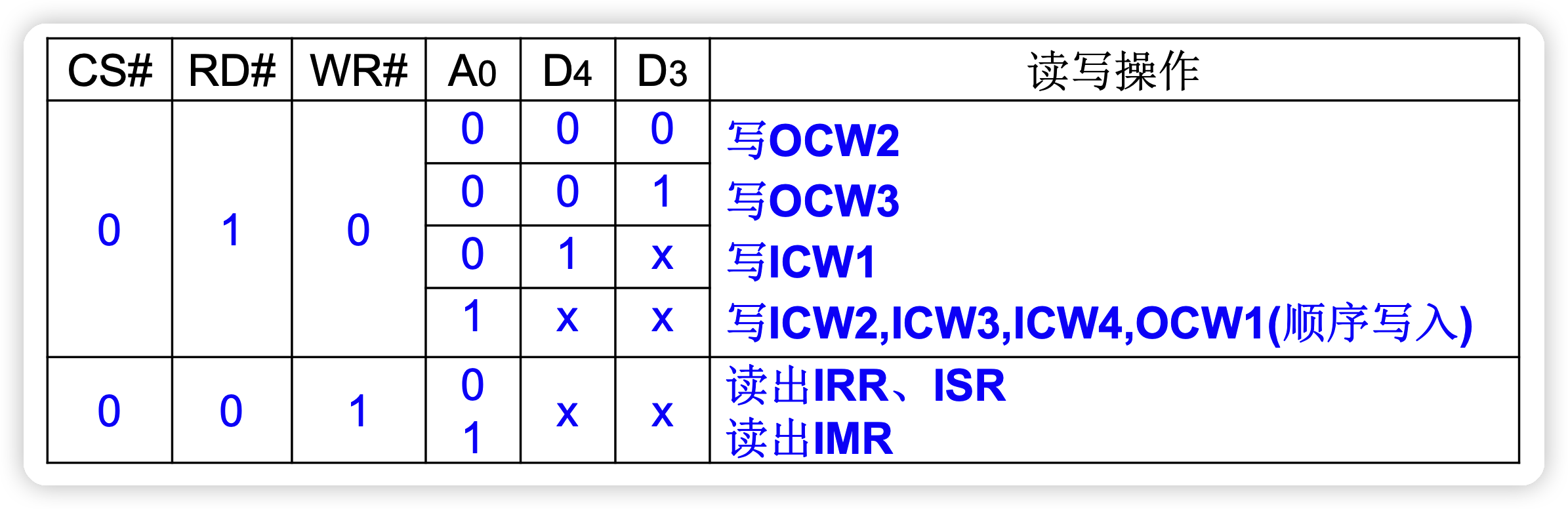
- 🌰:
- 接口地址为20H和21H
- MOV DX,20H ;A0=0,写ICW1 等
- MOV DX,21H ;A0=1,写ICW2,OCW1 等
- 记得OUT
初始化
顺序
写 ICW1 ➡️ 写 ICW2 ➡️ (级连写ICW3)➡️ (写ICW4)
ICW1(初始化字: 触发方式、级连控制、ICW4控制)
A0 D7 D6 D5 D4 D3(触发方式) D2 D1(级连控制) D0(ICW4控制) 0 X X X 1 LTIM(1 高电平触发) X SNGL(1 单片) IC4(1 要写ICW4) - 写ICW1意味着重新初始化8259A
- 写入ICW1后,8259A状态:
- ISR和IMR全0
- 中断屏蔽方式:一般屏蔽方式
- 中断结束方式:非自动
- 状态读出逻辑预置为读IRR
- 记:
- 上升沿触发+单片+不写ICW4 ICW1=12H
ICW2(中断向量码)
A0 D7 D6 D5 D4 D3 D2 D1 D0 1 T7 T6 T5 T4 T3 X X X - T7~T3: 中断向量码的高5位
- T2~T0: 中断源的序号,自动填入
- 例 若ICW2命令字为48H,则IR0的中断向量码为 48H,IR7的中断向量码为4FH
- 记:
- IR0 中断向量码 = ICW2
ICW3(级连控制字)
主片
A0 D7 D6 D5 D4 D3 D2 D1 D0 1 S7 S6 S5 S4 S3 S2 S1 S0 - Si=1 对应IRi线上连接了从片
从片
A0 D7 D6 D5 D4 D3 D2 D1 D0 1 0 0 0 0 0 ID2 ID1 ID0 - ID2
ID0 说明连接到主片的哪个IR引脚上;000~111分别对应**IR0IR7**
- ID2
ICW4(中断结束方式字)
A0 D7 D6 D5 D4(SFNM) D3(BUF) D2(M/S) D1(AEOI) D0 1 0 0 0 1 特殊全嵌套方式
0 一般全嵌套方式1 自动EOI方式
0 非自动EOI方式1 BUF M/S 1 1 缓冲方式**/主PIC** 1 0 缓冲方式**/从PIC** 0 X 非缓冲方式**/**正常
操作命令字
写入顺序任意
OCW1必须写入奇地址端口**(A0=1)**
OCW2、OCW3必须写入偶地址端口**(A0=0)**
OCW1(中断屏蔽字)
A0 D7 D6 D5 D4 D3 D2 D1 D0 1 M7 M6 M5 M4 M3 M2 M1 M0 - Mi=1 中断请求线IRi被屏蔽
- 写入IMR寄存器
- A0=1时读OCW1可读出IMR
OCW2(中断结束和优先级循环)
A0 D7(R) D6(SL) D5(EOI) D4 D3 D2 D1 D0 0 =1 优先级自动循环 = 1 SEOI = 0 AEOI 0 0 L2 L1 L0 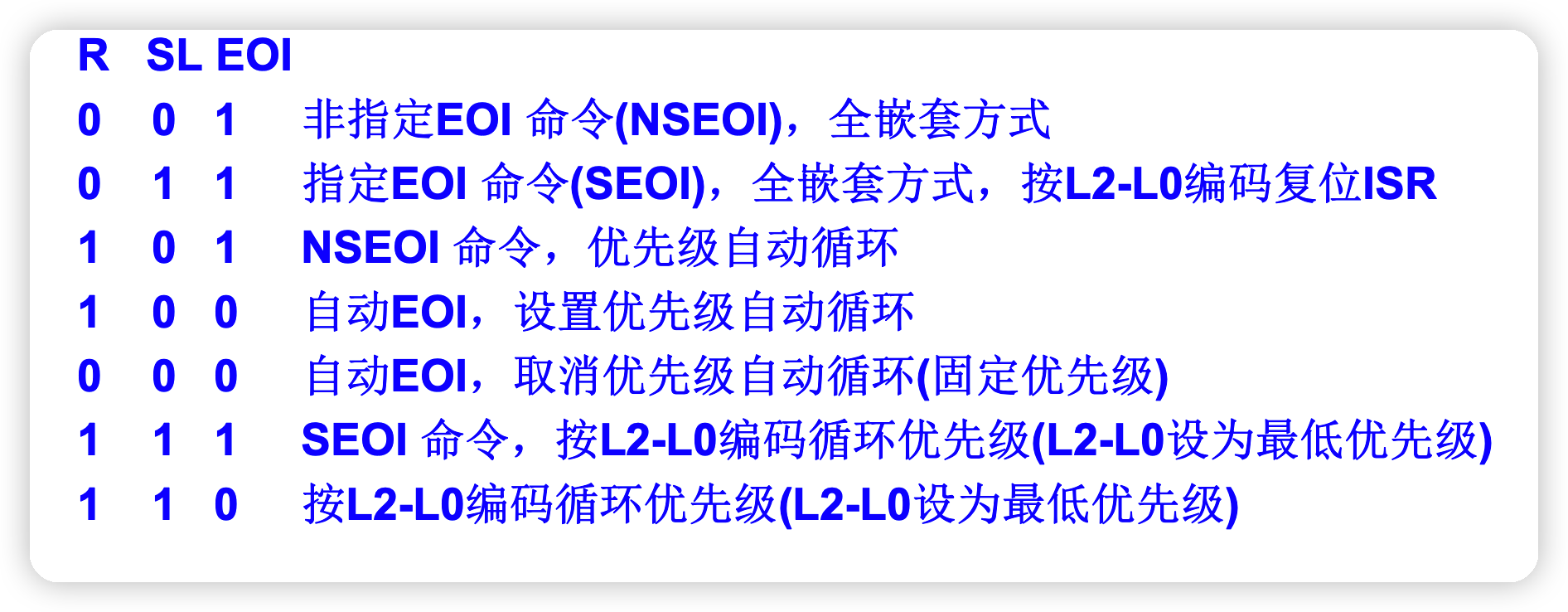
OCW3(屏蔽方式和读出控制字)
A0 D7 D6(ESMM) D5(SMM) D4(RIS) D3 D2 D1(P) D0(RR) 0 0 = 1
允许特殊屏蔽方式= 1
特殊屏蔽方式置位ISR/IRR选择
(=1读ISR)0 1 =1 查询方式 = 1允许读寄存器
PC机中断程序设计
- 主程序
- 保存原中断向量
- 设置自己的中断向量
- 初始化堆栈指针
- 设置8259A的中断屏蔽字
- STI
- 中断服务程序
- 保存所用到的寄存器内容
- 中断服务程序主体
- 恢复进入时保存的寄存器内容
- 发EOI命令
- STI
- IRET
8255A 并行I/O接口芯片
3个独立的8位并行I/O
- 端口A 常作数据端口,三种工作方式,A组
- 端口B 常作数据端口,两种工作方式,B组
- 端口C 可作数据、状态和控制端口,分两个4位,每位可独立操作(A组控制高4位、B组控低4位
- 可以按位操作,当其工作于 方式0下且作为输出口时,作为输出的位需要设置初始状态(1or0)
分外设接口、内部逻辑、CPU接口三部分
内部寻址
端口A 端口B 端口C 控制寄存器 00(A1A0) 01 10 11 控制字
方式选择控制字: 确定通道的工作方式,给出标识位
D7 D6 D5 D4 D3 D2 D1 D0 1 - D6~D3控制A组
- (D6D5)选择方式0~2
- D4 = 1 A组输入;D3 = 1 C端口(上)输入
- D2~D0控制B组
- D2 选择方式0~1
- D1 = 1 B组输入
- D0 = 1 C端口(下)输入
- D6~D3控制A组
通道C置位**/复位控制字: 控制C**口的输出开关量
D7 D6 D5 D4 D3 D2 D1 D0 0 X X X - (D3D2D1)为C端口位选择,(000) ➡️ 0,(111) ➡️ 7
- D0 = 1 ➡️ 置位
共用一根地址线,使用D7位判断控制字,D7=1表示为方式选择控制字
工作方式
方式0:基本输入输出方式
适用于无条件传送和查询方式的接口电路
- 查询输入输出方式: 把A、B口作为8位数据的输入/输出口,C口的高**/低4位分别定义为A、B**口的控制位和状态位
A口、C口的高4位、B口以及C口的低4位可分别定义为输入或输出,互相独立
输出的口有锁存能力,输入的口则无
C口有按位置位/复位能力
方式1:选通输入输出方式
- 适用于查询和中断方式的接口电路
- 一组选通控制信号控制A端口和B端口的数据输入输出,C位固定用作A、B口的选通控制信号
- A:PC3、PC6、PC7控制,B:PC2~PC0控制;指示两组数据口的状态及选通信号;
- PC4和PC5,用位控方式传送做I/O
- 输入
- STB#——选通信号,将外设数据送入8255的输入锁存器
- IBF——输入锁存器满。通知外设不能送下一个数据。 由STB的前沿产生。CPU用IN指令取走数据后, 信号被清除
- INTR——中断请求。STB#的后沿产生,用于中断 CPU,让CPU读走输入锁存器中的数据
- INTE——中断允许位,是否允许发出INTR请求。INTE =1和IBF为高电平时,允许发出INTR请求
- 输出
- OBF#——通知外设取走数据
- ACK#——外设响应信号,表示已从数据端 口取走数据,使OBF变高
- INTR——ACK#上升沿产生,通知CPU输 出下一个数据(通常接到8259)。
- INTE——中断允许位,INTE=1和OBF#为 高电平时,允许产生INTR信号。
- 数据端口均可设置为输入**/**输出方式,均可锁存
- 中断控制
- 中断允许触发器INTE控制,置位允许中断,复位禁止中断
- 选通输入
- 端口A的INTEA对应PC4
- 端口B的INTEB对应PC2
方式2:双向选通传送方式
- 用于 双向传送数据的外设和 查询和中断方式的接口电路
- 外设通过端口A即可向CPU发送数据,又能从CPU接收数据
- 只适用于端口A,端口B仍按方式0或方式1 工作
- 端口C的PC7
PC3位作为 端口A的控制**/状态信号端口,PC2**PC0用于B组 - 端口A的输入**/输出均有锁存功能;端口A**既可工作于查询方式,又可工作于中断方式
8253可编程计数器/定时器
内部结构和工作原理
计数器:设置好计数初值后,对外部触发脉冲响应减1计数,减为0时,输出结束信号
定时器:设置好定时常数后,对外部时钟信号响应减1计数,按定时常数不断产生时钟周期整数倍的定时间隔
内部总线连接 三个计数器、一个控制字寄存器、一个数据总线寄存器、一个I/O读写
寄存器选择方式
| !CS | !RD | !WR | A1 | A0 |
|---|---|---|---|---|
| 0 | 0(读) | 0(写) | 选择寄存器 | (A1A0) 11时设置控制字 |
外部引线
- 连接系统端
- D7~D0
- 片选
- 读写控制(两个
- A1、A0
- 计数通道
- CLKn 时钟脉冲输入,计数器的计时基准
- GATEn 门控信号输入,控制计数器的启停
- OUTn 计数器输出信号,不同工作方式下产生不同波形(方波、电平或脉冲)
内部计数器
3个计数器相互独立,各自按不同的方式工 作,控制寄存器中的控制字决定其工作方式
每个计数器内部结构相同
- 1个8位控制寄存器(只写
- 1个16位的计数初值寄存器
- 1个16位计数寄存器(减法计数器,计数执行部件
- 1个输出锁存器
控制字
8253必须先初始化才能正常工作,每个计数器都必须初始化一次
初始化8253时,CPU要向8253的控制字寄存器写入一个控制字规定8253的工作方式
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
|---|---|---|---|---|---|---|---|
| (D7D6)(00~10) | 计数器选择 | (D5D4)(00~11) | 读写控制 | (D3D2D1) | (000~101) | 工作方式选择 | 0(B计数) 1(D计数) |
| D5D4 | func |
|---|---|
| 00 | 计数器锁存(供CPU读) |
| 01 | 只读**/**写计数器低字节 |
| 10 | 只读**/**写计数器高字节 |
| 11 | 读**/写计数器16**位数 先低字节,后高字节 |
定时**/**计数工作过程
- 设置8253的工作方式
- 设置计数初值到初值寄存器
- 初值 = 产生信号周期*8253时钟频率
- 第一个CLK信号使初值寄存器的内容置入 计数寄存器,以后每来一个CLK信号,计数寄存器减1
- 减到0时,OUT端输出一特殊波形的信号
计数过程中还受到GATE信号的控制
计数启动方式
- 程序指令启动(软件启动
- GATE端保持为高电平
- 写入计数初值后的第2个CLK脉冲的下降沿开始计数
- 外部电路信号启动(硬件启动
- GATE端有一个上升沿
- 对应CLK脉冲的下降沿开始计数
- 计数过程中若GATE出现上升沿,则重新装入原始计数值,重新开始计数
计数过程中读计数值
- 读取当前计数值(计数过程中):
- 先向控制寄存器写锁存命令(即D5D4=00),把当前计数值锁存到输出锁存器
- 再读相应端口数据
- 停止计数器再读
- 用GATE信号使计数器停止
- 规定RL1和 RL0的读写格式后读出
- 读取装入的计数值:
- 直接读取相应的端口
- 分两次读出: 先低字节,后高字节
8253工作方式
Tip:
- GATE出现上升沿时重新装填计数初值
方式 0(软启动): 计数结束产生中断
- 向计数器写完计数值时开始计数,OUT变为0
- 计数到0时OUT输出为1,只计数一次
- GATE为低电平时停止计数
- 在计数时,若重新写入新的计数值,则按新的值重新工作
方式 1 (硬启动): 可重复触发的单稳态触发器(方式0的GATE受控循环
- 设置方式后,OUT即变为高电平
- 写入计数值后,当GATE的上升沿时开始计数,OUT变为低;计数到0后, OUT变高
- 若计数中改变计数值,则要下个硬启动才会以新数计数
方式2(软、硬启动): 分频器(方式1的自动版,可产生周期负脉冲
- 为自动装入计数常数的计数器,计数期间OUT为1, 计数到1后输出1个周期(CLK)的0,并重新装入计数值计数
- 若计数中改变计数值,则要下个周期才会以新数计数(自然的,以周期自动装入常数
方式 3(软、硬启动) : 可编程方波发生器(更改了方式2的OUT占空比
- OUT输出是一个占空比为1:1的方波
- 若计数为奇数,则前面的1比后面的0多1个脉冲
方式 4 : 软件触发的选通信号发生器
- 写入计数值后输出为高,开始计数(OUT)
- 计数结束时,输出1个脉冲低电平,再变高
- 若计数中改变计数值,则要结束后才会以新数计数
方式 5 : 硬件触发的选通信号发生器
写入计数值后由GATE上升沿启动计数
其余与方式4相同
 wechat
wechat alipay
alipay


