
《A Mathematical Theory of Communication》译文及解读
祖师爷的开山之作,这篇论文标志着信息论的诞生,也将人类社会拉入了信息时代
PS:这也是我昵称的由来 A.S. 即 After Shannon (一些科幻小说以此记年
INTRODUCTION近年来,各种调制方法如 PCM 和 PPM 通过增加带宽换取更低的信噪比,增加了人们对通信一般理论的兴趣。奈奎斯特[^1] 和哈特利[^2] 关于这一问题的重要论文中包含了这种理论的基础。在本文中,我们将扩展该理论,增加许多新的因素,尤其是信道中噪声的影响,以及在原始消息的统计结构和信息最终目的地的性质(不变)而可能的节省(带宽?)。
PCM: Pulse-code modulation 即 脉冲编码调制,一种将模拟信号数字化的方法,详见PCM
PPM: Pulse-position modulation 即 脉冲位置调制,一种调制信号的方法,详见PPM
通信的基本问题是在一个地方上准确或近似地再现在另一个地方上选择(发送)的消息。这些信息往往有意义;也就是说,它们指代或依据 具有某些物理或概念实体的系统,通信的语义方面与工程问题无关。重要的是,实际信息是从一组可能的信息中选择的。系统的 ...
嘿,Siri
Siri 和 SiriKit是啥是一款内置在苹果 iOS 系统中的人工智能助理软件,“Siri” 一词在挪威语中的意思是“带领你走向胜利的美丽女神”
SiriKit 允许通过 Siri 界面并通过语音命令访问应用程序功能。
SiriKit 能干啥
信息传递
支付相关
控制媒体
车载助手
等
尽管早在 iPhone 4S 时 Siri 就是 iOS 的一部分,但直到 iOS 10 的推出,Siri 的一些功能才通过 SiriKit 提供给开发者。
SiriKit 的目的是允许 Siri 通过语音命令访问 App 的一些功能。
例如,课表管理App可以允许用户通过语音询问下一节课是什么。
Siri 和 SiriKit当 App 与 SiriKit 集成时,Siri 会处理:
与用户交流
解释用户话语的含义
处理上下文相关的所有任务
然后 Siri 将用户的请求打包成一个 Intents 并将其传递给 App。App负责验证是否提供了足够的信息来执行任务,并指示 Siri 请求任何缺失的信息。
一旦 Intents 包含所有必要的数据,App 就会执行请求的任务并将结果通知 Sir ...
一笔画的背后
今天排队论的老师讲起了图论hhh
让我想起了小时候看的有关一笔画的东西,能不能一笔画成的规律倒是知道,但竟一直没想过如何证明证明。
今天正好借着图论开课的机会重新想一想,然后就翻到了欧拉的证明,大道至简,清晰的思维值得记录。
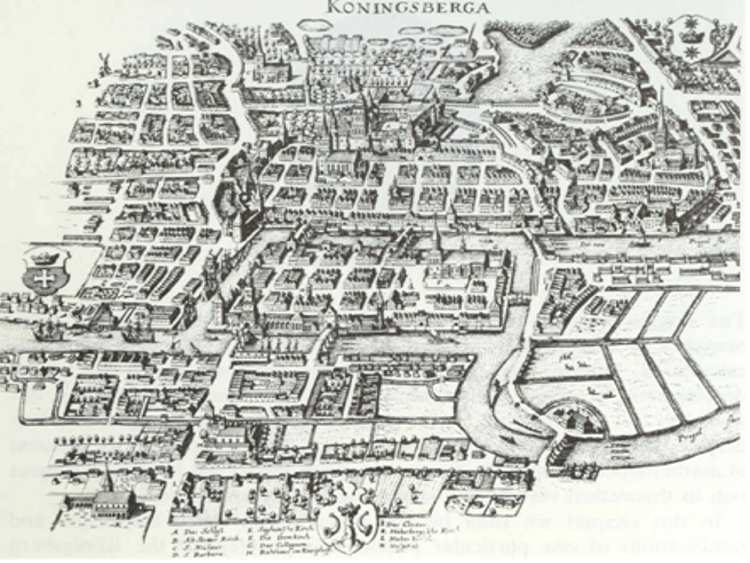
开端一笔画问题(Eulerian graph)是图论中一个著名的问题。一笔画问题起源于柯尼斯堡七桥问题。数学家欧拉在他1736年发表的论文《柯尼斯堡的七桥》中不仅解决了七桥问题,也提出了一笔画定理,解决了一笔画问题。
欧拉的研究是图论的开端。
莱布尼茨在1670年写给惠更斯的一封信中写道:
我不满足于代数,因为它既不能给出最短的证明,也不能给出最漂亮的几何结构。因此,考虑到这一点,我认为我们还需要另一种分析,几何的或线性的,直接处理位置,就像代数处理数值那样。
莱布尼茨的研究如今被称为 拓扑学,但作为一个数学领域在当时发展缓慢。正如高斯在1833年指出的
莱布尼茨开创了位置几何学,但当时只有欧拉和范德蒙(对,就是范德蒙行列式那位)两位几何学家对其略知一二。一个半世纪后,我们才懂得并掌握了这一几何学。
就是在高斯口中对几何学 略知一二 的欧拉的一篇论文,被誉 ...

四旋翼无人机的最基础
四旋翼无人机三系统动力系统
旋翼
伯努利原理、反扭矩
电机
可采用PWM控制的有刷电机
电池
飞控姿态的 采集 解算 控制
嵌入式系统
无线通信
姿态传感器
卡尔曼滤波
气压计
操控系统动力原理反扭矩对角线上的旋翼同方向旋转,两条对角线上产生的扭矩相互抵消,使得飞机机身保持稳定。
六自由度运动直线运动X、Y、Z三轴
角运动俯仰、滚转、偏航
控制$f_1$ 、$f_2$ 、$f_3$ 、 $f_4$ 四个旋翼产生的升力控制飞机姿态
$f_1$ + $f_2$ $\ne$ $f_3$ + $f_4$ 控制俯仰 Pitch
$f_1$ + $f_3$ $\ne$ $f_2$ + $f_4$ 控制偏航 Yaw
$f_2$ + $f_3$ $\ne$ $f_1$ + $f_4$ 控制滚转 Rool

ARKit基础之位置追踪
位置追踪SLAM
即Simultaneous Localization And Mapping ,即时定位与建图。
定位与定姿主要采用视觉惯性里程计(VIO)和惯性导航系统
VIO: Visual Inertial Odomentry
综合使用VIO与惯性导航可以实时追踪用户的位置。VIO在刷新帧之间计算用户的位置每秒30次以上,并行计算两次,至少以保证流畅 。VIO与惯性导航系统并行计算,计算完成后使用卡尔曼滤波或者非线性优化等手段结合两个系统结过给出最终结果。
6DOF为X、Y、Z加上俯仰、偏转、翻滚
惯性检测单元(IMU):加速度计和陀螺仪
惯性导航系统优点
精度高,每秒1000次运算
惯性导航系统缺点
随与视觉系统复位时间而降低精度
ARKit基础
ARKit 基础ARKit = AVFoundation + CoreMotion + CoreML图像/3D检测识别跟踪、人脸遮挡OK?、同时开前后摄像头、多人协作、景深、地理位置锚点不包含图形渲染API,使用RealityKit、SceneKit、SpriteKit、Metal等不足
在运动中做运动跟踪
跟踪动态环境(湖面)
热漂移(手机升温)
昏暗环境
ARSession管理AR应用的状态和整个生命周期,ARKit API 的主要入口ARAnchor(AR锚点)无法添加虚拟元素将虚拟物体固定到AR场景中工作原理:视觉校准技术,使锚点姿态不随着时间变化使用:1. 在可跟踪对象上(平面、人脸等)创建锚点2. 将虚拟物体链接到锚点使用场景:
虚拟物体“焊接”到某物体上
姿态不变
几个虚拟物体相对位置不变、独立性
提高跟踪性
注意:
尽可能重复使用锚点(独立锚点的对象可以 平移/旋转)
保持物体靠近锚点(1m)
分离未使用的锚点
种类:
ARPlaneAnchor 平面
ARImageAnchor 2D图像
ARObjectAnchor 3D物 ...

开篇
第一篇博客没啥好说的,所以就不说。
